¶ Cyphal/CAN device interconnection
This page demonstrates how Cyphal/CAN devices (or any set of CAN devices in general) can be interconnected together. For the background information, please refer to the UCANPHY specification.
¶ Non-redundant CAN bus
Devices with paired connectors can be interconnected together as shown on the figure below.
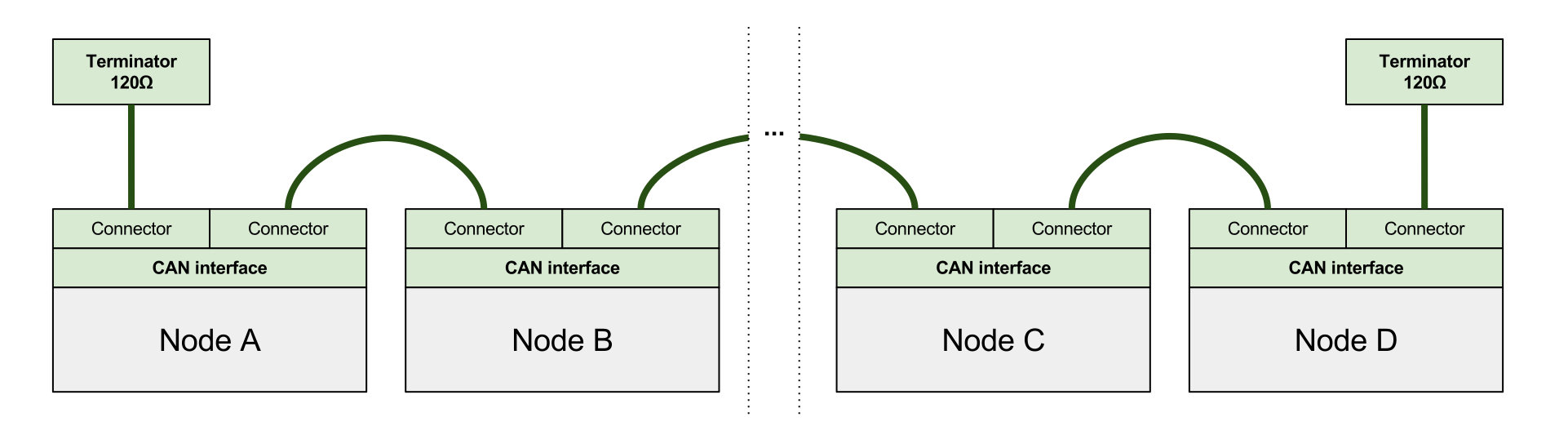
Note that some CAN bus devices have embedded termination resistors, and therefore they do not require an external termination plug on the unused connectors. Such nodes are usually implemented with only one CAN connector, and therefore they can only be placed at the ends of the bus. Some devices are equipped with a disableable termination resistor that can be turned on and off programmatically (for example, Zubax Babel). Please refer to the user manual to find out if your hardware has embedded termination resistors.
¶ Doubly-redundant CAN bus
Devices that feature redundant CAN bus interfaces should be connected in a similar manner, where the first interface of each device is connected to one bus, and the second interface is connected to the other bus. Same principle holds for triply-redundant CAN bus configurations.
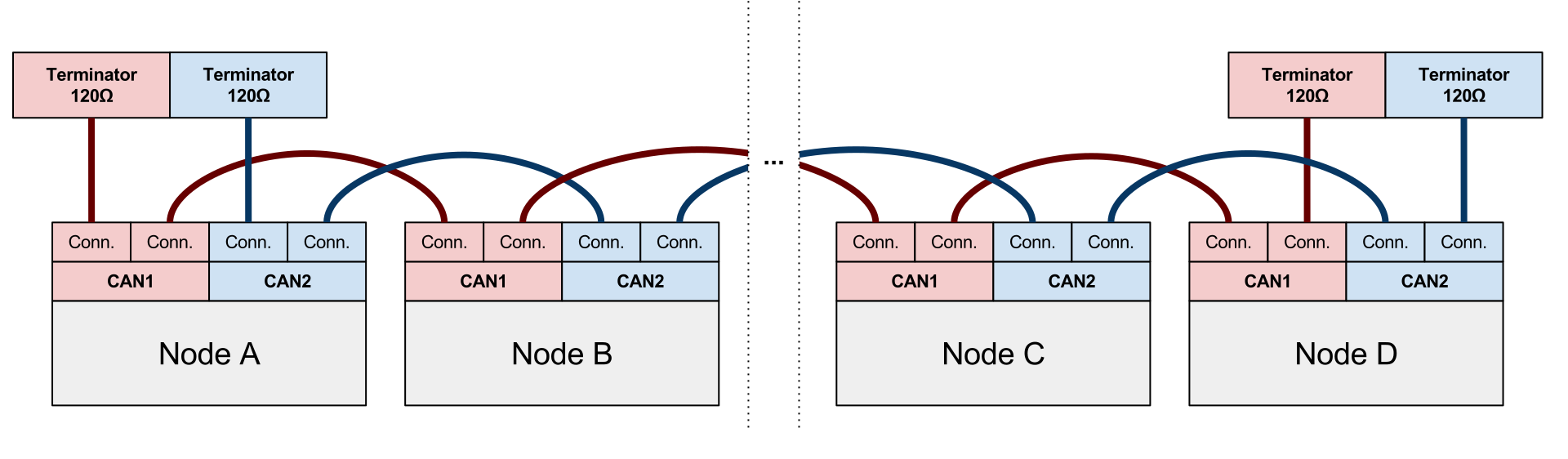
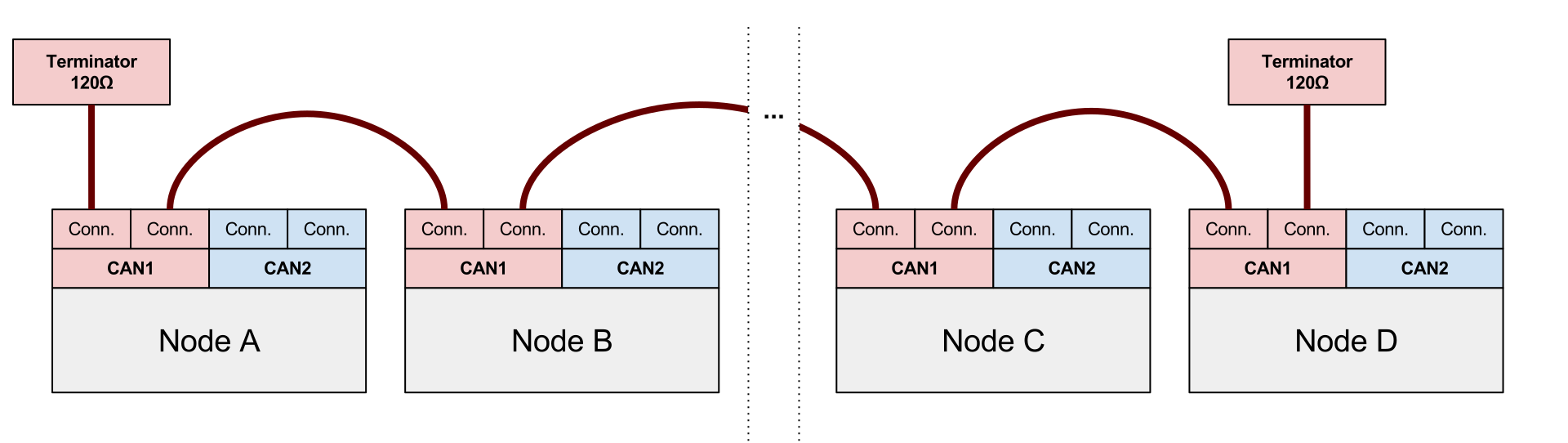
A device that features redundant CAN bus interfaces can be used in a non-redundant CAN bus configuration. In this case, only the first CAN bus interface must be used, and the redundant interfaces should be simply left unconnected, unless the user manual instructs otherwise.
If the device incorporates redundant CAN interfaces, the CAN bus connection circuitry prevents direct current flow between power inputs from different interface connectors, so that if one bus suffers a power failure (e.g., a short circuit), it won’t affect the other bus. The power inputs of all available interfaces are always protected by a self-recovering fuse or some other overcurrent protection circuit.
¶ Devices with different number of redundant interfaces
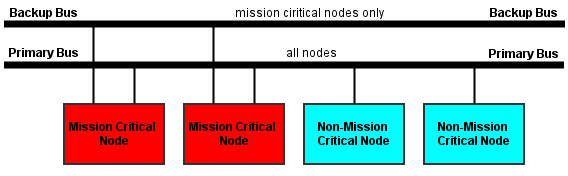
Mission critical devices and non-mission critical devices often may need to co-exist on the same network. Non-mission critical devices are likely to be equipped with a non-redundant CAN bus interface, which often creates a situation when multiple devices with a different number of redundant interfaces need to be connected to the same network.
If multiple devices with a different number of interfaces need to co-exist on the same network, the following rules should be followed:
- Each available CAN bus (Cyphal supports up to 3) is assigned a level of importance (primary or backup).
- All devices should be connected to the primary CAN bus.
- Only devices with redundant interfaces should be also connected to the backup bus/buses.
The figure below shows a doubly redundant CAN bus, but the same considerations apply to a triply redundant bus.